The source-page: http://www.tropicalcoder.com/NeuralGnats.htm
Soyut
Birçok sosyal protokol, kimliğe dayalıdır. Bir kadın, yaşlı bir erkeğe otobüste yerini teklif ediyor. Daha sonra genç bir adam yerini kadına verir. Her durumda, etkileşime giren katılımcıların kimliği, davranışlarını sosyal sözleşmeye göre dikte etti. Burada, sinir ağı tabanlı organizmalara, çekişmeli durumlarda keyfi olarak atanmış bir kimlik vermenin, onları çatışmayı önlemek için kendiliğinden bir protokol geliştirmeye teşvik ettiği bir deney açıklanmaktadır. Bu bir bütün olarak grup için avantajlıydı.
(Uyarı: Bunu uzun bir tartışma izler. Konuya hakim olanlar için kısa bir özet burada.)
Deney
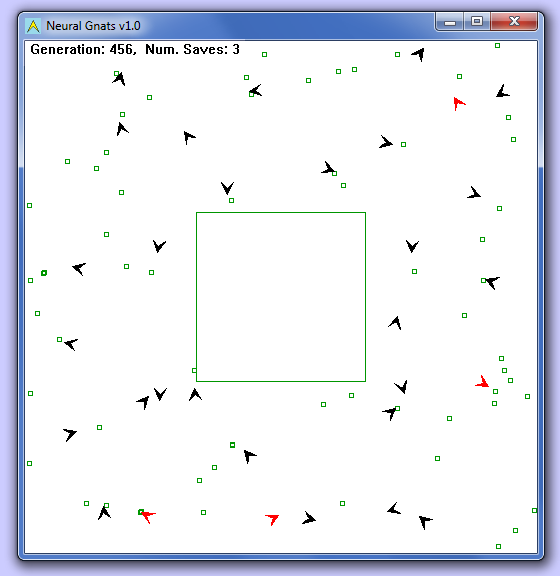
Başlangıçta, 32 nöral ağ tabanlı organizmadan oluşan bir koloni, kare bir torus gibi kendisine geri dönen ve her tarafa eşit olarak dağılmış 64 gıda parçacığıyla etkili bir şekilde uzun bir koridor olan bir alanla sınırlıdır. Her organizma, önceden belirlenmiş sayıda girdi nöronu, gizli katmandaki nöronlar ve çıktı için nöronlar içeren bir sinir ağından oluşan bir “beyne” sahiptir. Rastgele sinaptik ağırlıklar başlangıçta her organizmanın her bir nöronuna atanır.
Organizmalar, “yiyecek” aramak için dünyalarını dolaşmak için genetik bir algoritma aracılığıyla evrimleştirildi. Her bir yiyecek lokması tüketildiğinde, dünyanın başka yerlerinde sihirli bir şekilde bir başkası belirir, öyle ki her zaman tam olarak aynı sayıda yiyecek parçacığı bulunur.
Her adımda, gezinmek ve yiyecek bulmak için gereken bilgi, sinir ağının girişlerinde sunulur ve ağ, bir sonraki adımın yönünü ve hızını ifade ettiği bir çift çıkış nöronu aracılığıyla yanıt verir. Koloni tarafından bu dünyadaki birkaç bin adım tamamlandıktan sonra, bir sonraki nesli hangi “genlerin” (sinaptik ağırlıklar) oluşturacağını belirleyen genetik algoritmada her bireyin tükettiği toplam kaloriye göre değerlendirilir. En uygun olanın hayatta kalmasıdır. Az sayıdaki “elit” bir sonraki nesle aynen oldukları gibi taşınırlar. Rulet çarkı seçimi ile en uygun olanın çocukları oluşturulur. Bazı yavrular mutasyona uğradı. Çoğu zaman bazı mutasyonlar faydalı olacaktır ve bu nedenle koloni her nesilde gelişir.
İçinde yaşadıkları bu dünya, üstesinden gelinmesi gereken zorluklardan yoksun değildir. Organizmalar önce yiyeceğe nasıl gideceklerini öğrenmek zorundalar ve bunun için komşularıyla rekabet halindeler. Ayrıca kafalarını geçemeyecekleri duvarlara sonuçsuz bir şekilde çarpmaktan kaçınmayı da öğrenmeleri gerekir. Komplikasyonlara eklemek için (ve üst üste yığılmalarını önlemek için), bu dünyanın bir Yasası vardır: Yakındaki bir rakibin varlığında tüketilen yiyecekler besin sağlamaz. Bu, başarılı olmak için yemek yerken komşulardan kaçınmak için stratejiler geliştirmek için bir zorunluluk oluşturur.
Tartışma
İnsan toplumunda, kafa karışıklığına veya çatışmaya yol açabilecek durumlar her zaman ortaya çıkar ve biz de bu yolu yumuşatmak için protokoller geliştirdik. Örneğin, bir kapıya aynı anda yaklaşan iki kişiyi ele alalım. İlk kim girecek? Ne olursa olsun hepimiz ileriye atılırsak nasıl bir dünya olurdu? Çok hoş değil.
Bir “nezaket” kavramı geliştirdik. Kapıya ulaşan ikinci kişi genellikle birinciyi erteler. Bir erkek genellikle bir kadına boyun eğer, bir genç genellikle bir yaşlıya boyun eğer, vb. Yine de her zaman bu kadar kolay yürümez. İki akran aynı anda geldiğinde, her birinin “Senden Sonra” dediği klasik komedi ile sonuçlanabilir veya bazen kaba davranışlara tanık oluruz.
Bankada sıraya gireriz, sırayla sohbetler ve oyunlar oynarız ve “lütfen”, “teşekkür ederim” ve “özür dilerim” gibi sonsuz başka protokollerimiz vardır. Tabaktaki son kurabiyeyi kimin alacağını henüz tam olarak çözememiş olsak da, protokollerimiz sayesinde genel olarak günlük hayatımızda uyumlu bir şekilde dolaşabiliyoruz.
Genellikle Kimliğe Dayalı Sosyal Protokoller
Yukarıdaki senaryolardan bazıları, uygun rolü belirlemek için genellikle benlik ve öteki arasında net bir ayrım yapılmasına bağlıdır. Kim önce geldi, kim ikinci geldi. Yaşlı ve genç. Erkek ve kadın. Organizmalarıma kendilerini diğerlerinden tanıyabilmeleri ve buna dayalı bir tür protokoller oluşturabilmeleri için nasıl benzersiz bir kimlik duygusu verebilirim?
Orijinal deneyde, en yakın yiyecek parçacığına yön ve uzaklık, en yakın komşuya yön ve uzaklık ve “Mevcut Kimlik” için özel bir girdi sunulan 5 girdi vardı. (Daha sonraki deneyler sadece iki girdiyle basitleştirildi – aşağıda tartışıldı.)
Kiraliteye Dayalı Kimlik
Bir karşılaşma sırasında bir organizmayı diğerinden ayırt etmek için bir etiket olarak üç aşamalı bir “Ellilik” kavramını benimsedim. Her organizma, her neslin başlangıcında keyfi olarak “Sağlaklık” veya “Sollaklık” olarak atanır ve her iknadan eşit sayıda vardır. Daha sonra, dünyayı dolaşıp rakiplerle karşılaştıklarında, karşılaşma anında her ikisinin de aynı eli olduğu ortaya çıkarsa, olay yerine ilk ulaşan diğerinin zıt eli olarak değiştirilir.
Bu organizmaların hafızası yoktur. “Ebedi Şimdi”de yaşarken, kimliklerinin bir andan diğerine farklı olduğunu asla bilemeyeceklerdi. Bununla birlikte, sinirsel girdide bildirildiği gibi her iki kimlik için de tetiklenebilecek farklı davranışlardan oluşan bir repertuarı her zaman yanlarında taşıyabilirler.
Bir tur sırasında sonsuz sayıda karşılaşma olduğundan, bu, sonunda herhangi bir organizmanın her iki el olarak etiketlenmek için yaklaşık olarak eşit miktarda zaman harcamasını sağladı.
Bir parça yiyecek üzerinde herhangi bir çakışma yoksa, mevcut kimlik için bu girdi sıfıra ayarlandı. Bir organizmanın ve komşusunun kendilerini aynı lokmaya yöneldiği bir çatışma varsa, organizmanın mevcut elini kullanma durumu “Solak” için 1 veya “Sağlak” için -1 olarak girildi. Böylece üç olası durum vardı: Solak, Sağlak ve Kararsız (veya tercih ederseniz iki elle de.)
O zaman herhangi bir verili etkileşim her zaman sağ elini kullanan bir organizmayı ve bir sol elini kullanan bir organizmayı içeriyordu. Her organizma, eğer isterse, bu etkileşimin nasıl olması gerektiğine kendi mevcut tercihine göre karar verebilir, ancak onlara ne yapmaları gerektiği konusunda hiçbir ipucu verilmez.
Beni bunu denemeye teşvik eden şey, eğer işbirliği yaparlarsa, her zaman birbirlerinden kaçınıp “son kurabiyeyi tabakta bırakmaktan” çok daha fazla puan kazanabileceklerinin bana ne kadar açık göründüğüydü.
Sonuç
İlk denemem başarılı oldu. Navigasyonun temellerini öğrendikleri birkaç yüz nesilden sonra, genellikle iki kişi aynı yiyecek için kendilerini çekiştirirken bulduklarında sırayla hareket etmelerini sağlayacak bir protokol keşfederlerdi. Böylece herkes daha iyi yiyecekti.
Belki de en iyi golcünün mutant yavrularında bir tür sinirsel işlev bozukluğu ile başlar, örneğin, kimlik girdisindeki 0 veya 1, yiyeceğe gitmeyi engellemez, ancak -1 yapar. Aniden, kimliği -1 olduğunda yarışmacıya ertelendiği söylenebilir, ancak diğer tüm durumlarda en skorer oyuncu olmaya devam eder. Şans eseri genlerini bir sonraki nesle de aktarabilseydi, soyu her karşılaştıklarında birdenbire sıraya girecek ve grup ödülü anında, önemli ve kendi kendini güçlendirecekti.
Yani burada bir hipotez var. Ver ve al davranışı, bir bütün olarak genom için faydalı olan birey(ler) için genetik bir kusur olarak başlar.
Organizmaların çok fazla hareketliliğe sahip olmadığı bir durumda bu başlangıcı hayal etmek daha kolaydır. Sonra bir organizmanın, hepsi aynı genetik kusuru paylaşan, bir bütün olarak gruba fayda sağlayan birkaç yavruya sahip olduğunu düşünün. Bu koloni gelişebilir ve çevresel nişi devralabilir.
Mevcut deneyde, çekişen herhangi bir yiyecek parçacığı için, her zaman çok uzak olmayan başka seçenekler vardır. Yiyecek hızlı bir şekilde tüketiliyorsa, herhangi bir organizmanın etrafında sürekli olarak yeni yiyecek parçacıkları ortaya çıkıyor, bu nedenle bir yiyecek parçacığını terk etmek uzun süre aç kalmak anlamına gelmiyor. Yakında başka biri görünür.
O zaman, anında ödülü ertelemek ve yerleşik protokole göre kibar olmak çok daha verimlidir, ancak bu, bir komşunun devam etmesine ve organizmanın yarısından fazlasını yemesine izin vermek anlamına gelse bile. Sonunda, her iki organizma da daha fazla besin elde etmek için daha az adım gerektirecek ve genel olarak gıda arzında herkesin yararına olacak şekilde daha fazla çalkantı olacaktır.
Birkaç deneyde, bazı koloniler birkaç yüz nesil içinde kendi inisiyatifleriyle bir protokol geliştirdiler, bu sayede sağ elini kullanan organizmalar sürekli olarak sol elini kullananlara boyun eğdi ve diğer koloniler eşit olasılıkla zıt protokolü geliştirdi. Diğer kolonilerde, hiçbir protokol geliştirilmedi, bu da her zaman yiyecek için kavga eden kötü huylu organizmalara yol açtı. Bu koloniler, uygar kolonilerden önemli ölçüde daha düşük puan aldı (~%40 daha düşük grup puanı).
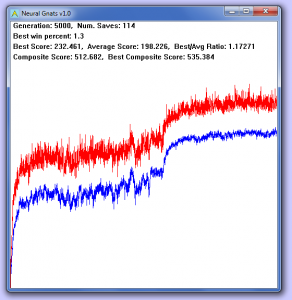
Aşağıdaki resim bir koloninin öğrenme eğrisini göstermektedir. Mavi çizgi, nesil başına çizilen grup ortalama puanı, kırmızı çizgi ise yüksek puan grafiğidir.
Gezinmeyi öğrendikçe ilk artışın, ilk 3000 nesil boyunca (yolun 3/5’ine kadar) yaklaşık 330 noktaya ulaştıklarında düzleşme eğiliminde olduğunu fark edeceksiniz. Bu aralıkta eğrinin kaotik olduğunu da gözlemleyeceksiniz. Bunun nedeni, sık sık üst üste yığılma eğilimi göstermeleridir ve bu da puanlarda önemli değişkenliğe neden olur.
Aniden yaklaşık 3000 nesilde “din alırlar” ve kibarca sırayla almaya başlarlar. Puanları, sıfırdan ilk tırmanışa eşit bir eğimle hızlı bir yükselişe başlar. Sonraki 2000 nesiller için grup puanının (mavi) grafiğinin çok daha yumuşak olduğunu görebilirsiniz, artık yemek için tartışmıyorlar. Puanları yeni seviyede sabitlenmeden önce 535 puana yükseliyor.
Arka fon
Sinir ağı tabanlı organizmaların ekranda dolaşıp “yiyecek” aramak için evrimleştiği birçok önceki deneyi geliştirdim. Bu onlar için öğrenmesi kolay bir şey ve bunu başarmanın birçok yolu var. En basit deneyde, en yakın yiyecek parçacığına olan yön, organizmanın mevcut yönüne göre bir denge olarak tek bir sinirsel girdide sunulur. “Gizli katman”da iki nöron ve nöral ağın bir sonraki adımın yönünü ve hızını ifade ettiği iki çıkış nöronu vardır.
Köpek için topa parmağınızla işaret etmek gibidir. Bazı köpekler bunu anlayamaz ve parmağınıza bakar. Diğerleri işaret ettiğiniz yöne bakacak ve topu almaya gidecek. Nöral ağ temelli organizmalar söz konusu olduğunda, yalnızca “anlayanlar” zenginleşecek ve yeni nesiller üretmeye devam edecek ve sonraki nesiller gıdaya yönelmede giderek daha yetkin hale gelecekler.
Sonunda, keşfe yol açan algılanan bir sorun
Bununla birlikte, bu girdilerden başka bir şey olmadığında, organizmaların belirli bir yerde aynı kalan yiyecek parçasının peşine düşerek kendilerini belli bir yerde bulma eğiliminde olmaları kaçınılmazdır. Sonra hepsi birbirinin üstüne yığılmış halde bir sonrakine geçerler, tünel görüşlerinin farkında olmadan, dağılsalar bile herkese yetecek kadar yiyecekle çevrili olduklarını görmelerine izin vermezler. Bu yığılma eğilimi, öğrenme eğrilerine kaos getirir, çünkü basit şanssızlık en yetkin olanları devre dışı bırakabilir.
Bir çözüm
Bu senaryoyu tekrar tekrar izleyerek, bu yığınlardan nasıl kaçınacağımı düşündüm. Açıkça, çevreleri hakkında biraz daha fazla bilgiye ve birbirlerinden uzak durma yönünde arzu edilen davranışı geliştirebilecekleri bir ödül ve/veya ceza sistemine ihtiyaçları olacak.
Birkaç şey denedikten sonra, onlara yalnızca en yakın yiyecek parçacığına olan yön ve mesafeyi değil, aynı zamanda en yakın rakiplerine olan yön ve mesafeyi de vermeye karar verdim. Sonra Kuralı ortaya koydum: Bir yarışmacının önünde yenen yiyeceklerden hiçbir besin elde edemezler (20 piksellik bir yarıçap içinde veya birkaç vücut uzunluğu içinde).
Çok geçmeden, rakiplerinden saygın bir mesafeyi korurlarsa başarılı olduklarını keşfettiler. Çok yaklaşanlar açlıktan öldü. Şimdi buna bir tür “sosyal davranış” diyebiliriz, ancak daha sonraki deneylerde tanık olunan olağanüstü davranışa yaklaşmaz.
Bir Sapık
O noktada yaptıklarının felsefi sonuçlarını hiç düşünmedim bile. Bunun yerine, sunulan tüm yiyeceklerden yararlanmak için ekranın etrafına yayıldıklarında grup puanlarının nasıl yükseldiğini fark ettikten sonra, daha verimli olmaları için nasıl değiştirilebileceklerine kafayı taktım.
Onlara çevreleri hakkında farklı türde bilgiler vermek için sonsuz deneyler yaptım, örneğin, en yakın rakibin o anki yönü ve yönü ya da bir sonraki en yakın yiyecek parçacığının yönü ve en yakındaki yiyecek parçacığının yönü gibi. ikisi arasında seçim yapabilir ve belki de buna bir sonraki en yakın komşunun yönünü de ekleyebilir, böylece kalabalıktan uzakta bir yiyecek parçacığına daha iyi bir rota çizebilirler.
Tüm bu deneyler farklı derecelerde başarılıydı ve 8’e kadar girdisi olan organizmalarım vardı. Sonra onları süper verimli yapan bir fikir buldum. Yiyecek yönü ve mesafesi ile en yakın komşu yönü ve mesafesi için girdileri ekleyerek, onlara, komşusu onunla aynı yiyecek parçacığının peşindeyken organizmaya sinyal verecek bir girdi verdim. Bu girdi, potansiyel bir çatışma olmadığında sıfır, bir komşu yiyecek parçacığının peşindeyken ve ona daha yakın olduğunda -1 ve organizma yiyeceğe komşusundan daha yakın olduğunda 1 olacaktır. Aniden puanlar yükseldi ve çok daha fazla puan aralığına izin vermek için öğrenme eğrisinin ve diğer parametrelerin sunumunu yeniden tasarlamak zorunda kaldım.
Matematiği onlar için daha kolay hale getirmek için devam ettim. Daha önceki sürümlerin matematiksel sabit PI’nin bazı dahili temsillerini ve arktanjantları hesaplama yeteneğini geliştirmelerini gerektirdiği yerlerde, ben onlara açısal farklılıkların normalleştirilmiş büyüklüğüne dayalı daha basitleştirilmiş başlık bilgisi vermeye ve onlardan almaya başladım. Bu artık onların bazı içsel PI kavramlarını geliştirmelerini veya arktanjantlar yapmalarını gerektirmiyordu. Etkili bir şekilde, bu yeni şema ile yapmaları gereken tek şey basit toplamalar ve çıkarmalar ve belki de biraz ölçeklendirmeydi.
Puanları artmaya devam etti, ancak onları ne kadar verimli hale getirirsem, o kadar az ilgi çekici hale geldiler, çünkü her yeni değişiklik kendi taraflarında daha az hayal gücü gerektiriyordu. Tabii ki şimdi organizmalar için daha akıllıca değildi. Rahatlıkla gezinebilirlerdi. Ne zaman huzur içinde otlayabileceklerini biliyorlardı, komşularına tecavüz etme endişesi duymadan ve yiyecek konusunda çekişme olduğunda, bir yiyecek parçacığının peşinden gitmenin mi yoksa onu bir rakibe bırakmanın mı daha verimli olacağını biliyorlardı. Burada kesinlikle sosyal davranış hakkında felsefi olarak analiz edilecek hiçbir şey yoktu.
Sosyal Davranış Doğuyor
İşte o zaman aklıma geldi. Farz edelim ki, bir protokol üzerinde çalışmalarını onlara bıraktım, böylece biri yoldan çekilirken diğerinin yemeğinden besin almasına izin verebilirler mi?
Organizmalarıma kendilerini diğerlerinden tanıyabilmeleri ve buna dayalı bir tür protokoller oluşturabilmeleri için nasıl benzersiz bir kimlik duygusu verebilirim?
İlk denemem, her birine bir sayı atamaktı, ancak kendi sayılarını komşununkiyle karşılaştırabilmeleri ve bundan genel bir anlam çıkarabilmeleri için nasıl yapmalı? Ayrıntıları size vermemekle, bu yönde attığım herhangi bir yaklaşım başarısız oldu.
Sonra yukarıda anlatıldığı gibi “Handedness” çözümüne ulaştım. Mevcut kullanımları daha sonra her adımda sinir ağının çeşitli girdileri arasında yer alan bilgi parçalarından biri haline geldi.
Minimum Gereksinimler
Artık sosyal davranış sergileyen makul bir şekilde işleyen bir modelim olduğuna göre, gerekli minimum girdilerin neler olduğunu düşündüm. İlk geliştirdiğim modelde yön ve yemeğe gidiş, yön ve en yakın rakibe yönelme için beş girdi ve özel bir kimlik girdisi vardı. Yine de bu organizmaların dünyayı dolaşabileceklerini ve tek bir girdiyle yiyecek bulabileceklerini biliyordum.
Düşündüm, ya onlara, yemeğe giden girdinin yanı sıra, mevcut kimlik için sadece ikinci bir girdi verirsem? Bu girdi gerçekten aynı anda çok fazla bilgi aktarıyor. Sıfır olduğunda, organizma, yiyeceklerinin ardından rakip olmadığını bilerek huzur içinde otlayabilir. İşaret verildiğinde, gidecekleri yemek konusunda bir çekişme olduğunu bilirler. Aynı zamanda benzersiz kimliklerinin de farkındadırlar. Eğer bir çatışmadan kaçmayı seçerlerse, mevcut istikametlerinin tam tersine doğru yönelmeyi veya en azından o yönde daha fazla ilerlememeyi bilirlerdi.
Sadece bir açıklama yapmak gerekirse, sadece iki girdiyle, sinir ağı temelli organizmalar, yaşadıkları dünya hakkında pek bir şey bilmiyorlar, en azından komşuları bile var. Gerçekten bildikleri tek şey, yiyeceğin nerede olduğu ve kimlik girişi sıfır olduğunda her zaman besleyici olduğudur. Bununla birlikte, kimlik girişi sinyallendiğinde, besine ulaştıklarında yiyeceğin gitmiş olabileceğini veya yediklerinde onlara hiçbir besin sağlayamayacağını öğrenirler. Elbette bu açıklama bile bir antropomorfizmdir. Çok bilimsel değil, ama bazen direnmek çok eğlenceli.
Anlaşıldığı üzere, daha karmaşık modelde ilk kez görülen aynı sıra alma davranışını kendiliğinden ortaya çıkarmak için gereken tek şey bu bilgidir. O zaman gerekli olan tek şey toplam 6 nörondur: Girdi katmanı için iki, gizli katman için iki ve çıktı için iki nöron. Model çok basit olduğu için çok hızlı gelişiyor. Yaklaşık 10.000 nesil içinde genellikle zirveye ulaşmıştır.
Son Onay
İki girişli modelle, çekişme olmadığında kimlik girişinin artık sıfıra ayarlanmadığı ve bu nedenle el tercihinin artık çekişmeye karşı bir uyarı işlevi görmediği son bir deney yaptım. Organizmalar dünyayı dolaşırken, tek bildikleri en yakın yiyecek parçacığının yönü ve o andaki el becerisiydi. Organizmaların hafızası olmadığı için, ellerinin değiştiği anın farkına bile varmazlardı, bu yüzden yiyecekleri için rekabet halinde olduklarını bilmenin hiçbir yolu yoktu.
Bu durumda bile, ödül küçük olmasına rağmen bir protokol geliştirdiler – herhangi bir protokol olmadan elde ettiklerinin 20 ila 30 puan üzerinde. Bununla birlikte, grup puanlarındaki değişkenliğin azalması, öğrenme eğrisinin düzleştirilmesinde açıkça görülebilir.
Bu rejim altında üç koloni yönettim. Kişi hiçbir zaman el kullanımından herhangi bir fayda göstermedi. Sağ ve sol elini kullananların yön bulma becerilerinde fark yoktu.
İkinci koloni ortalama olarak birkaç puan daha yüksekti ve grup puanlarında biraz daha az kaos gösterdi. Yakın gözlem, solak olduklarında, yiyecek parçacıklarını bir nevi yana kaydırma eğiliminde olduklarını, sağ elini kullananların ise yiyeceklere kafa kafaya saldırdıklarını ortaya çıkardı. Bu, her birinin bir sonraki adımda farklı bir yiyecek parçacığı görme olasılığını artırdığı için kümelenme eğilimini biraz azalttı ve bu nedenle rotaları farklı olabilir.
Bununla birlikte, üçüncü koloni, el kullanımında açıkça avantaj buldu. Yaklaşık 5.000 nesil sonra sağ elini kullananlar öğün atlamaya başladılar. Çoğu zaman, sanki orada değilmiş gibi, geniş bir kavis çizerek bir yiyecek parçacığının yanından geçerler, belki de her saniye veya üçüncü yemek fırsatı kadar geri dönerlerdi. Öte yandan, sol elini kullananlar hızlı ve çevikti, her seferinde doğrudan yemeğe gidiyorlardı. Grup puanı 20 puan veya daha fazla yükseldi ve kümelenme eğilimi en aza indirildiğinden grup puanlarının grafiği gözle görülür şekilde düzeldi. Ancak en çok gol atan oyuncunun puanlarındaki önemli değişkenlik eskisi gibi devam etti.
Geliştirdikleri protokolün kararlı olmadığı ortaya çıktı. Birkaç bin nesil sonra söndü, birkaç kez yeniden kuruldu ve sonunda tekrar kayboldu. Deneyi yaklaşık 20.000 nesilde bitirdiğimde protokollerini asla yeniden keşfetmemişlerdi.
Gelecek Araştırma Yönü
İhtiyaç duyulan şey, bildirilen davranışın ortaya çıktığı andaki araştırmadır. Ortaya çıkması için hangi koşullar gereklidir? Şu anda anlaşılan tek şey, sinir ağlarında hala yeterli plastisite varken, bu davranışın gelişmesi için ilk birkaç bin nesil içinde kısa bir pencereye sahip olduğu. Bu süre içinde ortaya çıkmazsa, 80.000 nesil boyunca yapılan testlerle teyit edildiği gibi, asla olmayacaktır.
İndirme ve Talimatlar
Uygulamayı -buradan- indirebilirsiniz. Paketi açın ve ReadMe dosyasını okuyun. Ayrıca, kendiniz için bildirilen davranışı doğrulayabilmeniz için kaynak kodunu bir MSVC2008 projesi olarak kullanıma sunuyorum.